
Welcome to Code Point
Here we present All type of Blog
Here we present All type of Blog

Here we present All type of Blog
Intelligent Walking Shoes for Blind & Deaf is significant because million of people in our country blind and deaf. Blind & Deaf people need to rely on others for many aspects of their lives life. The main problem is when they walk down the street .
Arduino Nano
Jumper Wire
Ultrasonic Sensor
Buzzer
Battery and connecter 9V
Switch
Small Vibrating Motor
1.Arduino Nano : The Arduino Nano has a number of facilities for communicating with a computer, another Arduino, or other microcontrollers. The ATmega328 provides UART TTL (5V) serial communication, which is available on digital pins 0 (RX) and 1 (TX).
2.Jumper Wire : Jumper Wire is the electrical conductor in many categories of electrical wiring. Copper wire is used in power generation, power transmission, power distribution, telecommunications, electronics circuitry, and countless types of electrical equipment. Copper and its alloys are also used to make electrical contacts.
3.Ultrasonic Sensor : The ultrasonic sensor is an electronic device used to measure distances. Because, measuring distance is an essential factor in many applications such as robotic control, vehicle detection etc. Sensors such as optical and sound are the most helpful. Ultrasonic sensors are used as proximity sensors
4.Buzzer : A buzzer or beeper is an audio signaling device, which may be mechanical, electromechanical, or piezoelectric (piezo for short). Typical uses of buzzers and beepers include alarm devices, timers, train and confirmation of user input such as a mouse click or keystroke.
5.Battery and connecter 9V : This is 9V Battery Connector Snap. It is used to connect a 9V battery to the required application. This snap power cable to DC 9V clip male line battery adapter for mostly used to power Arduino boards as well as many development boards. The connector comes with open-wire at one end and battery connector at another end.
6.Switch : A switch is used in a wired network to connect to other devices using Ethernet cables. The switch allows each connected device to talk to the others. Wireless-only networks do not use switches because devices such as wireless routers and adapters communicate directly with one another.
7.Small Vibrating Motor:A vibratory motor is a three-phase motor that is intentionally unbalanced, and is also known as an eccentric rotating mass (ERM) or vibrating motor. Vibratory motors are used to vibrate sieves, troughs and tables, but also to separate products in a bunker or landfill pipe.
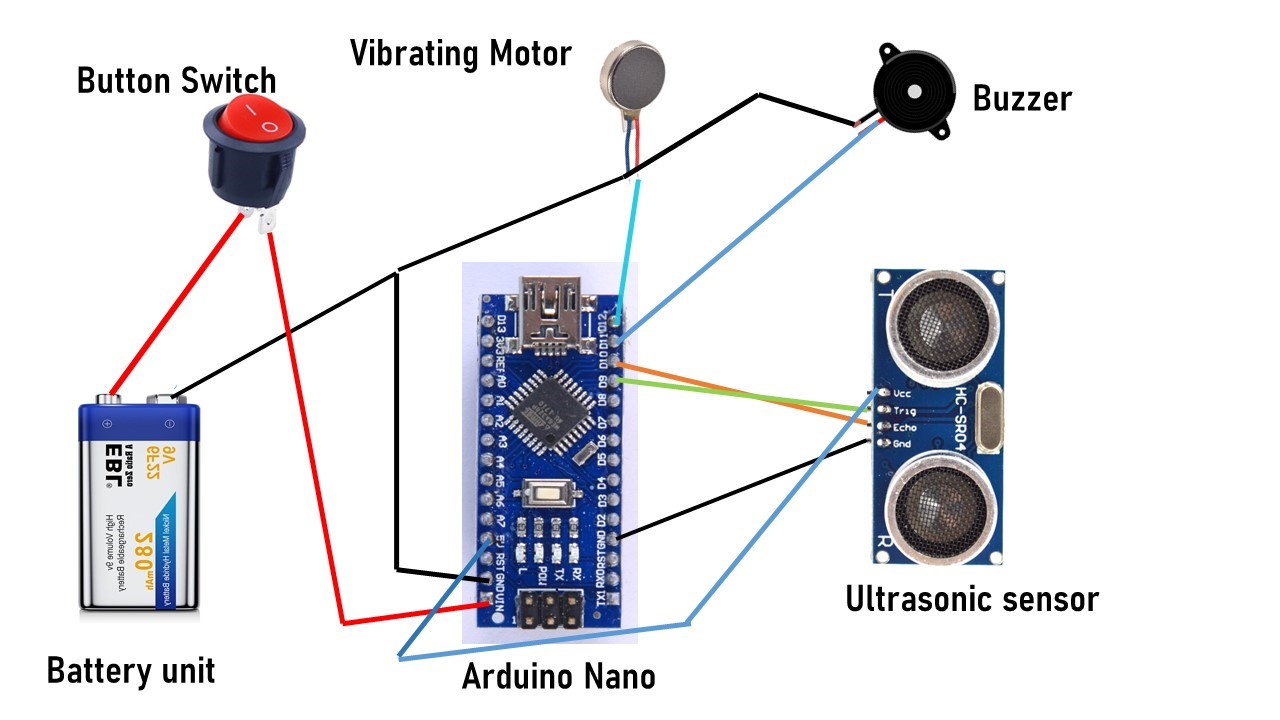
Here we use Digital pins 10 and 9 to connect the Echo Pins and Trigger pin. VCC connect to V5, and GND is connected to the GND pin in Arduino Nano.
Next, we will connect the Buzzer, the Positive terminal of the Buzzer to Digital pin 11, and the Negative terminal to the ground.
Next, we connect the Vibrating motor +ve terminal to digital pin 12 and another pin to the ground.
The battery connecter and switch module are connected separately. Arduino Nano Vin pin can take voltage from 9 to 12v, so we connect the pin for the Button switch to VIN and –ve terminal from battery to GND Nano.
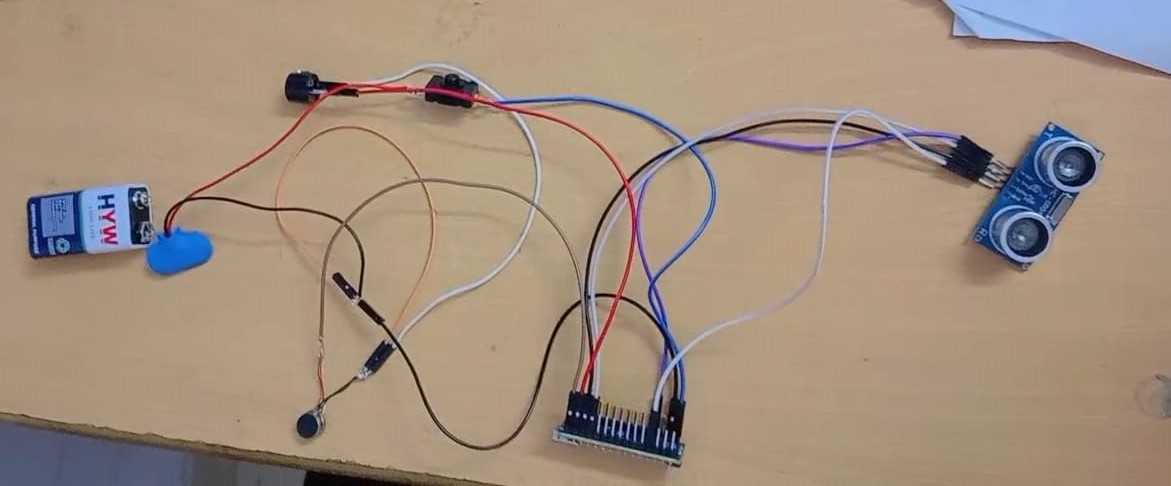
After that, I Assembled these items in the shoes I created
We are making this a separate circuit because we don’t need this module while programing. If Those who don’t have a battery connecter and switch can avoid this circuit and try with the power bank you have, you need to power the Nano using the same USB cable used for programming.
.jpg)
.jpg)
.jpg)
// defines pins numbers
const int trigPin=9;
const int echoPin=10;
const int motor=12;
const int buzzer=11;
// define the duration and distance variables
long duration, distance;
void setup()
{
pinMode(trigPin, OUTPUT); // trigPin as an Output
pinMode(echoPin, INPUT); // echopin as an Input
pinMode(motor, OUTPUT); // motor as an Output
pinMode(buzzer,OUTPUT); // buzzer as an Output
}
void loop()
{
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin on HIGH state for 10 micro seconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Reads the echoPin, returns the sound wave travel time in microseconds
duration = pulseIn(echoPin, HIGH);
// Calculating the distance
distance = duration*0.034/2;
if (distance < 50) // Checking the distance, you can change the value
{
digitalWrite(motor,HIGH); // When the the distance below 50cm
digitalWrite(buzzer,HIGH);
} else
{
digitalWrite(motor,LOW);// when greater than 20cm
digitalWrite(buzzer,LOW);
} delay(500);
}